Getting Started¶
Making an environment¶
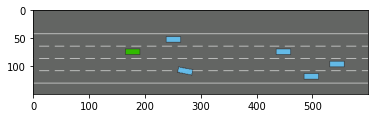
Here is a quick example of how to create an environment:
import gym
import highway_env
from matplotlib import pyplot as plt
%matplotlib inline
env = gym.make('highway-v0')
env.reset()
for _ in range(3):
action = env.action_type.actions_indexes["IDLE"]
obs, reward, done, info = env.step(action)
env.render()
plt.imshow(env.render(mode="rgb_array"))
plt.show()
All the environments¶
Here is the list of all the environments available and their descriptions:
Configuring an environment¶
The observations, actions, dynamics and rewards
of an environment are parametrized by a configuration, defined as a
config dictionary.
After environment creation, the configuration can be accessed using the
config attribute.
import pprint
env = gym.make("highway-v0")
pprint.pprint(env.config)
{'action': {'type': 'DiscreteMetaAction'},
'centering_position': [0.3, 0.5],
'collision_reward': -1,
'duration': 40,
'initial_spacing': 2,
'lanes_count': 4,
'manual_control': False,
'observation': {'type': 'Kinematics'},
'offscreen_rendering': False,
'other_vehicles_type': 'highway_env.vehicle.behavior.IDMVehicle',
'policy_frequency': 1,
'render_agent': True,
'scaling': 5.5,
'screen_height': 150,
'screen_width': 600,
'show_trajectories': False,
'simulation_frequency': 15,
'vehicles_count': 50}
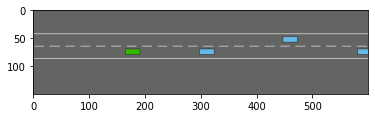
For example, the number of lanes can be changed with:
env.config["lanes_count"] = 2
env.reset()
plt.imshow(env.render(mode="rgb_array"))
plt.show()
Training an agent¶
Reinforcement Learning agents can be trained using libraries such as rl-agents, baselines or stable-baselines.
The highway-parking-v0 environment trained with HER.¶
import gym
import highway_env
import numpy as np
from stable_baselines import HER, SAC, DDPG, TD3
from stable_baselines.ddpg import NormalActionNoise
env = gym.make("parking-v0")
# Create 4 artificial transitions per real transition
n_sampled_goal = 4
# SAC hyperparams:
model = HER('MlpPolicy', env, SAC, n_sampled_goal=n_sampled_goal,
goal_selection_strategy='future',
verbose=1, buffer_size=int(1e6),
learning_rate=1e-3,
gamma=0.95, batch_size=256,
policy_kwargs=dict(layers=[256, 256, 256]))
model.learn(int(2e5))
model.save('her_sac_highway')
# Load saved model
model = HER.load('her_sac_highway', env=env)
obs = env.reset()
# Evaluate the agent
episode_reward = 0
for _ in range(100):
action, _ = model.predict(obs)
obs, reward, done, info = env.step(action)
env.render()
episode_reward += reward
if done or info.get('is_success', False):
print("Reward:", episode_reward, "Success?", info.get('is_success', False))
episode_reward = 0.0
obs = env.reset()
Examples on Google Colab¶
Use these notebooks to train driving policies on highway-env.
A Model-based Reinforcement Learning tutorial on Parking

A tutorial written for RLSS 2019 and demonstrating the principle of model-based reinforcement learning on the parking-v0 task.
Trajectory Planning on Highway
Plan a trajectory on highway-v0 using the OPD [HM08] implementation from rl-agents.
Parking with Hindsight Experience Replay
Train a goal-conditioned parking-v0 policy using the [AWR+17] implementation from stable-baselines.